



|
|
|||
| Log In | |||
|
| |||
|
| |||
| |||
| |||
| |||



Automotive ![]() CANBus
CANBus ![]() Kvaser
Kvaser ![]() CAN_LIN
CAN_LIN
Introducing the Kvaser Hybrid 2x CAN/LIN
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||

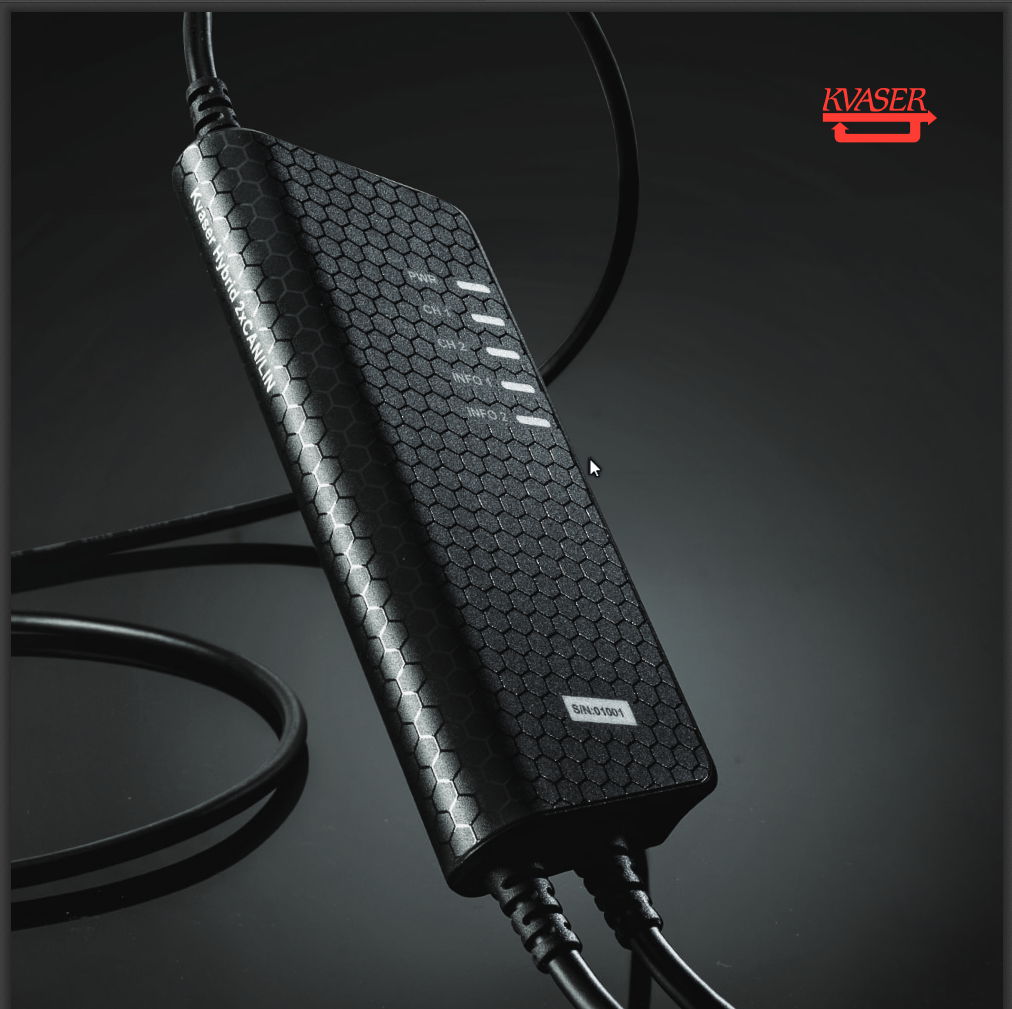


 CAN & LIN in HarmonyAn essential tool for automotive engineers, CAN and LIN can now be configured using a single tool. Easy access, from climate control to calibration, using one device. |
 Unbeatable PerformanceThis compact, high-performance interface uses a standard USB connector and two high-speed CAN or LIN channels in separate 9-pin D-SUB CAN connectors. |
 Configuration Begins Instantly With Kvaser’s software, configuration can begin as soon as the interface is powered on. |
Ultimate 2-Channel FlexibilityEach channel can be configured for either CAN or LIN, allowing multiple configurations tailored to your needs. |
 Universal Standards CompatibilityThe Kvaser Hybrid is fully compatible with J1939, CANopen, NMEA 2000 and DeviceNet—plus it works with Kvaser’s universal API. |
 CAN FD ReadyBoth channels support CAN FD, up to 5 Mbit/s (with proper physical layer), when in CAN mode. |
|
|
Major Features
- Hybrid USB CAN/LIN interface.
- Supports CAN FD, up to 5 Mbit/s (with proper physical layer)
- Supports High-Speed CAN (ISO 11898-2) up to 1Mbit/s.
- Supports CAN 2.0 A and CAN 2.0 B active.
- Quick and easy plug-and-play installation.
- Supports LIN 2.2.
- Power is taken from the USB bus.
- LIN reference power detection.
- Fully compatible with J1939, CANopen, NMEA 2000 and DeviceNet.
- Fully compatible with applications written for other Kvaser CAN hardware with Kvaser CANlib.
- Galvanically isolated bus drivers.
- Extended operating temperature range from -40 to 85 °C.
Warranty
- 2-Year Warranty. See our General Conditions and Policies for details.
Support
- Free Technical Support on all products available by contacting [email protected].
Software
- Documentation, software and drivers can be downloaded for free at www.kvaser.com/downloads .
- Kvaser CANLIB SDK is a free resource that includes everything you need to develop software for the Kvaser CAN interfaces. Includes full documentation and many program samples written in C, C , C#, Delphi and Visual Basic.
- All Kvaser CAN interface boards share a common software API. Programs written for one interface type will run without modifications on the other interface types!
- J2534 Application Programming Interface available.

Tech Specs
| CAN Channel Performance Data | ||
| Bitrate | Messages Per Second | Can fd |
| 50 - 1000 kbps | 20,000 | Up to 5Mbit/s |
| LIN Channel Performance Data |
| Bitrate |
| 1-20 kbps |
| General Hardware Data | |||
| Temp Range | Galvanic Isolation | Weight | Length |
| -40 to 85 °C | Yes | 165 g | 170 mm |
| Height | Depth | Channels | Certificates |
| 47 mm | 18 mm | 2 | CE, RoHS |
| PC Interface | os | ||
| USB | Windows 10, 8, 7, Vista, and Linux | ||
Order your Hybrid Canlin [00965-3] USB Interface Here: